Generando documento PDF
Por favor, espere unos instantes
¿Demasiado tiempo cargando?
Recargue la página e inténtelo de nuevo.
Por favor, espere unos instantes
¿Demasiado tiempo cargando?
Recargue la página e inténtelo de nuevo.

Descripción
Otra Información
Número de investigadores:
10
Estado de desarrollo:
Desarrollado pero no comercializado
Derechos de propiedad intelectual:
Patentado
Diferenciación en el mercado:
Novedad
Aplicabilidad de la tecnología:
Sí
Empresas y mercados:
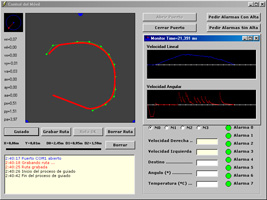
Robótica y guiado de vehículos. Las aplicaciones que puede tener este trabajo van desde su empleo en el transporte de materiales en entornos que pueden resultar peligrosos para un conductor humano. También, y especialmente, puede ser de gran utilidad para facilitar la movilidad de personas con severas discapacidades, como por ejemplo el uso dentro de un hospital para facilitar el movimiento de los pacientes dentro del mismo
Ventajas:
Sistema automatizado para guiado de movimientos
Información adicional:
Código UNESCO:
3314 - Tecnología médica
Otros miembros:
Miguel López Coronado
Roberto Hornero Sánchez
El LATUV se creó en 1989, se adquirió una antena receptora Meteosat Secundaria, válida para recibir las transmisiones WEFAX, analógicas, del Meteosat. A pesar de lo elemental de este primer equipamiento, se consiguió realizar dos Tesis Doctorale... Leer más >
OBJETIVOS• El Observatorio del Ocio y el Entretenimiento Digital es un proyecto creado por la profesora Nereida López en 2009 (en el que participan además los señalados como miembros de este GIR) con el objetivo de servir como instrumento para e... Leer más >
El presente proyecto desarrolla y diseña una plataforma acuática provista de control remoto con propulsión autónoma, equipada con una serie de sensores que realiza pasadas dentro del cauce de los ríos midiendo parámetros del agua y del fondo de... Leer más >
Pervasive Computation Group (PerComp) enfoca su actividad a la utilización de sistemas móviles.Las principales líneas de trabajo son: - Aplicación de dispositivos móviles comunes (Smarthpones, tablets) basados en el uso de sus ... Leer más >


